


Experiments with motors
Motors
Electric motors are used to efficiently convert electrical energy into mechanical energy. Magnetism is the basis of their principles of operation. They use permanent magnets, electromagnets, and exploit the magnetic properties of materials in order to create these amazing machines.
There are several types of electric motors available today. The following outline gives an overview of several popular ones. There are two main classes of motors: AC and DC. AC motors require an alternating current or voltage source (like the power coming out of the wall outlets in your house) to make them work. DC motors require a direct current or voltage source (like the voltage coming out of batteries) to make them work. Universal motors can work on either type of power. Not only is the construction of the motors different, but the means used to control the speed and torque created by each of these motors also varies, although the principles of power conversion are common to both.
Motors are used just about everywhere.
In your house, there is a motor in your furnace for the blower, for the intake air, in the sump well, dehumidifier, in the kitchen in the exhaust hood above the stove, microwave fan, refrigerator compressor and cooling fan, can opener, garbage disposer, dish washer pump, clocks, computer fans, ceiling fans, and many more items! I once counted over 137 electric motors in my house.
In industry, motors are used to move, lift, rotate, accelerate, brake, lower and spin material in order to coat, paint, punch, plate, make or form steel, film, paper, tissue, aluminum, plastic and other raw materials.
They range in power ratings from less than 1/100 hp to over 100,000 hp. The rotate as slowly as 0.001 rpm to over 100,000 rpm. They range in physical size from as small as the head of a pin to the size of a locomotive engine.
What happens when a wire carrying current is within a magnetic field?

This is the Left Hand Rule for motors.
The first finger points in the direction of the magnetic
field (first - field), which goes from the North pole to the South pole.
The second finger points in the direction of the current in
the wire (second - current).
The thumb then points in the direction the wire is thrust or
pushed while in the magnetic field (thumb - torque or thrust).
So, when a wire carrying current sits perpendicular to a magnetic field, a force is created on the wire causing it to move perpendicular to the field and direction of current. The greater the current in the wire, or the greater the magnetic field, the faster the wire moves because of the greater force created. If the wire sits parallel with the magnetic field, there will be no force on the wire.
This is what Tesla exploited to make AC motors.
Experiment ![]()
Let's check this out by placing a magnet near an oscilloscope and see what happens. Remember, the trace of electrons on the scope goes from left to right, which means that conventional current is going from right to left (conventional current is opposite to the electron current). So, rotate your hand so that the current is going in the opposite direction in the wire from what is shown in the photo above, from right to left. Then, if I place a North pole near that trace of electrons, the field is going into the scope face, same direction as shown in the photo above. Therefore, the thrust will be down, since the thumb is then pointing down. A South pole would cause the trace to move in the opposite direction = up.
Let's see what we get.
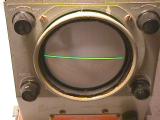


The first photo is the scope trace with no magnetic field.
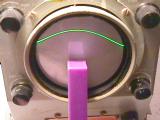
The second photo is the scope trace with a North pole near it. The trace
goes down like we expected from the paragraph above.
The third photo is the scope trace with a South pole near it. The trace
goes up like we expected.
The fourth photo is the scope trace with a South pole on the left, causing the
trace to move up, and a North pole on the right, causing the trace to move down.
Cool! Experiment matches theory!
This force on the electrons is what causes the wire carrying current in a magnetic field to want to move, which is what causes motors to rotate.
Fleming's Left Hand Rule
Demo ![]()


This demo shows what happens to a current carrying wire sitting in a magnetic field, supporting the Fleming Left Hand Rule. There are two large donut magnets attached to the steel brackets, bolted to the wood base. A cradle or swing made out of bare copper wire is hung between the two wire supports. The power is supplied by a 12.6Vac transformer, which is rectified and limited by four 1Ohm resistors in series. The switch is a momentary switch to the left and to the right, with center position off.



This first photo shows the swing with no current flowing. The second photo shows the swing moved forward due to the current flowing from right to left in the wire. The third photo shows the swing moved toward the back due to the current flowing from left to right in the wire. This is reaction is used in motors and in speakers.
Types of Motors
There are several types of motors used in industrial, commercial and residential applications:
For more information, go to:
DC motors
Universal
AC motors
Linear
Stepper
Not only are the motors built differently, but their speed / torque curves and load regulation curves are different from each other. This is a case of optimizing a machine for specific characteristics.
Another area of study is the control of each of these motors. The type of power electronics and control electronics needed to control the speed, torque and direction of rotation of each type of motor is unique for each one. A motor controller is often referred to as a drive. The hundreds of papers presented every year at the Industrial Applications Society of the IEEE is an indication of the amount of time spent improving the control of motors. Drives reduce the energy used by motors in fan and pump applications, and improve processes in thousand of other applications. This is a fascinating area of study and an exciting profession! (It also just happens to be my profession, too!)